2021年度中国科学十大进展揭晓:天问一号、中国空间站等入选(3)
如何通过设计新结构(如创建纤维锂离子电池)满足电子产品高度集成化和柔性化发展要求,是锂离子电池领域面临的重大挑战。复旦大学彭慧胜、陈培宁等发现纤维锂离子电池内阻与长度之间独特的双曲余切函数关系,即内阻随长度增加并不增大,反而先下降后趋于稳定。在此理论指导下构建的纤维锂离子电池具有优异且稳定的电化学性能,能量密度较过去提升了近2个数量级,弯折10万次后容量保持率超过80%;建立的世界上首条纤维锂离子电池生产线,实现了其规模化连续制备;编织集成得到的纤维锂离子电池系统,电化学性能与商业锂离子电池相当,而稳定性和安全性更加优异。
纤维聚合物锂离子电池的集成组装示意图
8. 可编程二维 62 比特超导处理器“祖冲之号”的量子行走
量子行走是经典随机行走的量子力学模拟,是实现量子模拟、量子搜索算法乃至通用量子计算的工具。中国科学技术大学朱晓波、潘建伟等通过研发兼容平面工艺的三维引线技术,实现了量子比特结构从一维向二维的拓展,设计并制作了一个由 62个比特组成的8×8 的二维结构超导量子比特阵列,构建了“祖冲之号”量子计算原型机,并通过该装置演示高保真的单粒子和双粒子连续时间量子行走。利用量子处理器的高可编程性,实现了量子比特激发粒子行走路径的精确调控,在固态量子芯片实现了马赫-曾德尔干涉仪。该工作是世界范围内公开发表的首个比特数超过60的超导量子计算领域的成果,验证了对含噪声中等规模量子比特系统的高精度量子调控能力,为研制祖冲之二号、实现“量子计算优越性”奠定了基础。
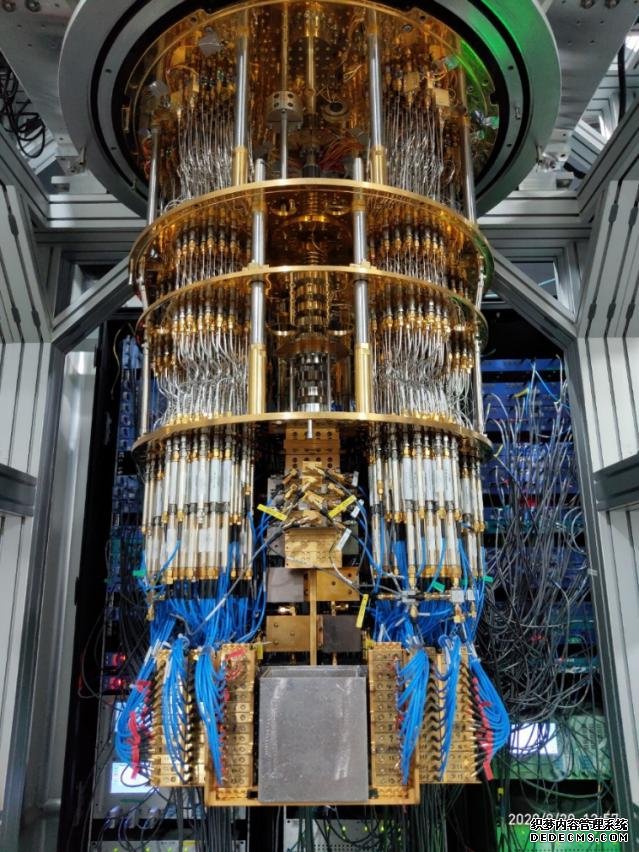
祖冲之号
9. 自供电软机器人成功挑战马里亚纳海沟
深海机器人与装备需要高强度金属耐压外壳或压力补偿系统来保护内部机电系统。浙江大学李铁风等从深海狮子鱼“头部骨骼分散融合在软组织中”这一生理特性提取仿生灵感,揭示了深海极端压力条件下软机器人功能器件破坏及驱动失效的内在机制;提出了硬质器件分散融入软基体实现内应力调控的方法,以及适应深海低温、高压环境的电驱动人工肌肉融合制造方法;建立了万米深海软机器人的系统构造方法和驱动理论。所研制的自供电软机器人成功挑战马里亚纳海沟,实现了10900米海底深潜和驱动,在南海海平面以下3224米实现深海航行。该研究大幅降低了深海机器人的重量及经济成本,推动了软体机器人在深海工程领域的应用。
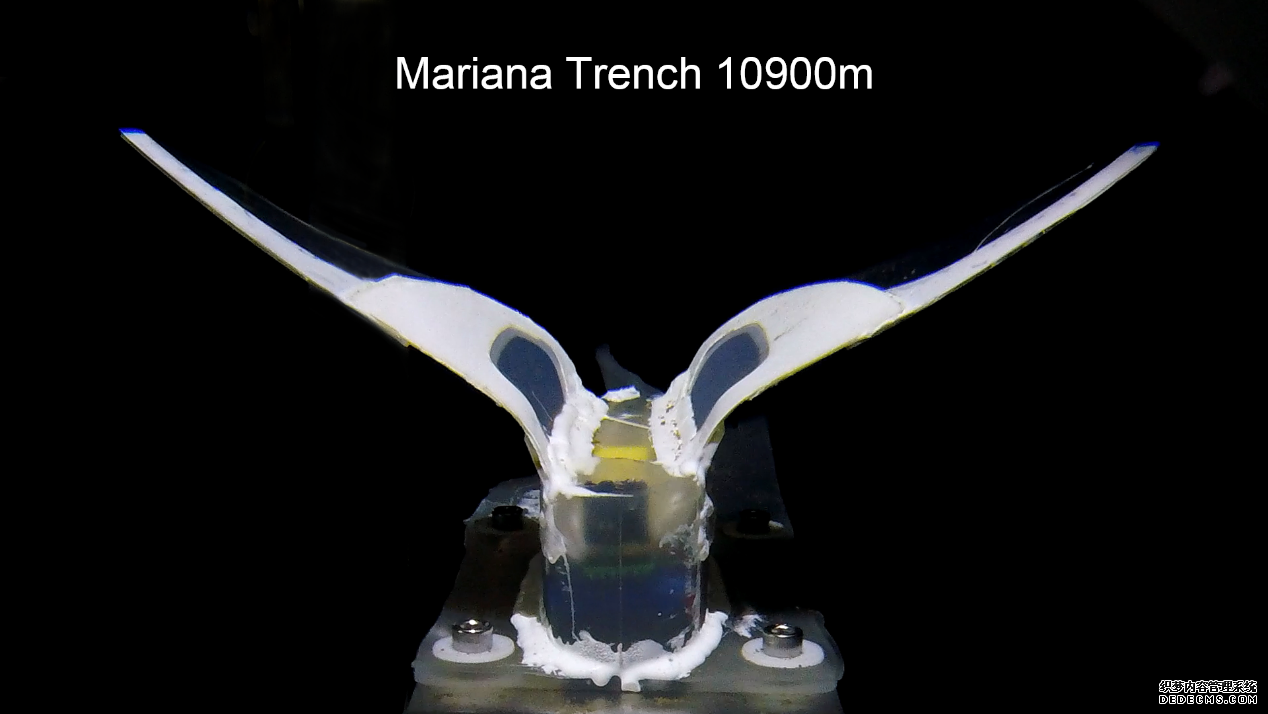
软机器人在马里亚纳海沟万米深海驱动实验
10. 揭示鸟类迁徙路线成因和长距离迁徙关键基因
“迁徙生物如何发现其迁徙路线?”一直是社会和学术界广泛关注的议题,也是Science杂志125个最具挑战性科学问题之一。中国科学院动物所詹祥江等历时12年,利用卫星追踪数据和基因组信息,建立了一套北极游隼迁徙研究系统,发现游隼主要使用5条路线穿越亚欧大陆,西部游隼表现为短距离迁徙,东部为长距离迁徙。在末次冰盛期到全新世的转换过程中,冰川消退所导致的繁殖和越冬地变迁,可能是迁徙路线形成的主要历史原因。研究还发现迁徙距离更长的游隼携带ADCY8优势等位基因,该基因与长时记忆形成有关,表明长时记忆可能是鸟类长距离迁徙的重要基础。该研究结合遥感卫星追踪、基因组学、神经生物学等研究手段,通过多学科整合分析方法阐明了鸟类迁徙路线变迁成因和遗传基础。
